
Hauke Strasdat, PhD
strasdat ät gmail.com |
 |
|
|
|
|
|
Also, check out my google scholar profile.
|
2013
|
|

|
R. Salas-Moreno, R. Newcombe, H. Strasdat, P. Kelly and A.J. Davison
SLAM++: Simultaneous Localisation and Mapping at the Level of Objects
In Proceedings of the IEEE Conference on Computer Vision and
Pattern Recognition (CVPR) Portland, 2013.
[pdf]
|
2012
|
|

|
H. Strasdat
Local Accuracy and Global Consistency for Efficient Visual SLAM
PhD Thesis, Imperial College London, Oct, 2012.
[pdf]
|
|
H. Strasdat,
J.M.M. Montiel,
and A.J. Davison
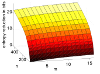
Visual SLAM: Why Filter?
Image and Vision Computing (IMAVIS) 2012.
(Editor's Choice)
[pdf]
|
2011
|
|
|
H. Strasdat,
A.J. Davison,
J.M.M. Montiel,
and K. Konolige,
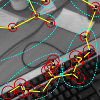
Double Window Optimisation for Constant Time Visual SLAM
In Proceedings of the IEEE International Conference on Computer Vision (ICCV), 2011.
[pdf, videos, code]
|

|
R. Kümmerle,
G. Grisetti,
H. Strasdat,
K. Konolige,
and
W. Burgard.
g2o: A General Framework for Graph Optimization.
In Proceedings of the IEEE International Conference on Robotics
and Automation (ICRA), Shanghai, China, 2011.
[pdf, code]
|
2010
|
|
|
H. Strasdat,
J. M. M.
Montiel,
and
A. J. Davison.
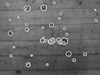
Scale-drift Aware Large
Scale Monocular SLAM.
In Proceedings of Robotics Science and Sytems (RSS),
Zaragoza, Spain, June 2010.
(16% acceptance rate)
[pdf, code, video]
|
|
|
|
A. Hornung, M.
Bennewitz, C. Stachniss, H. Strasdat, S. Oßwald, and Wolfram
Burgard.
Learning Adaptive Navigation Strategies for
Resource-constrained Systems.
In Proceedings of the 3rd International Workshop on
Evolutionary and Reinforcement Learning for Autonomous Robot Systems
(ERLARS)
at the European Conference on Artificial Intelligence, August, 2010. |
|
|

|
A. Hornung, M. Bennewitz,
and H. Strasdat.
Efficient Vision-based Navigation - Learning about the
Influence of Motion Blur.
In Autonomous Robots, Vol. 29, Number 2, 2010.
[pdf]
|
|
|
|
A. Handa, M. Chli,
H. Strasdat, and A. J. Davison.
Scalable Active Matching.
In Proceedings of the IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), San Fransico, CA, US, June 2010.
[pdf]
|
|
|
|
H. Strasdat,
J. M. M. Montiel, and A. J. Davison.
Real-time Monocular SLAM:
Why Filter?
In Proceedings of the IEEE International Conference on Robotics
and Automation (ICRA), Anchorage, Alaska, US, May 2010.
(Best Vision Paper
Award)
[pdf]
|
|
|
2009
|
|
|
A. Hornung,
H. Strasdat, M. Bennewitz, and W. Burgard.
Learning Efficient
Policies for Vision-based Navigation.
In Proceedings of the IEEE/RSJ Conference on Intelligent Robots
and Systems (IROS), St. Louis, Missouri, US, 2009.
[pdf]
|
|
|

|
H. Strasdat,
C. Stachniss, and W. Burgard.
Learning Landmark
Selection Policies for Mapping in Unknown Environments.
In Proceedings of the International Symposium of Robotics Research
(ISRR), Zurich, Switzerland, 2009.
[pdf]
|
|
|

|
H. Strasdat,
C. Stachniss, and W. Burgard.
Which Landmark is Useful?
Learning Selection Policies for Navigation in Unknown Environments.
In Proceedings of the IEEE International Conference on Robotics
and Automation (ICRA), Kobe, Japan, 2009.
[pdf]
|
|
|
2008
|
|

|
S. Srinivasa,
D. Ferguson, M. V. Weghe, R. Diankov, D. Berenson,
C. Helfrich, and H. Strasdat.
The Robotic Busboy: Steps
Towards Developing a Mobile Robotic Home Assistant.
In Proceedings of the International Conference on Intelligent
Autonomous Systems, Baden-Baden, Germany, 2008
[pdf]
|
|
|
2007
|
|

|
H. Strasdat,
M. Bennewitz, and S. Behnke.
Multi-cue Localization for
Soccer Playing Humanoid Robots.
In RoboCup 2006: Robot Soccer World Cup X - Lecture Notes in
Computer Science, Vol. 4434, pp. 245-257. Springer, Berlin /
Heidelberg, 2007.
[pdf]
|
|
|

|
H. Strasdat,
C. Stachniss, M. Bennewitz, and W. Burgard.
Visual Bearing-only
Simultaneous Localization and Mapping with Improved Feature Matching.
In Fachgespräche Autonome Mobile Systeme (AMS),
Kaiserslautern, Germany, 2007.
[pdf]
|
|
|

|
H. Schulz,
H. Strasdat, and S. Behnke.
A Ball is Not Just Orange:
Using Color and Luminance to Classify Regions of Interest.
In Proceedings of the Second Workshop on Humanoid Soccer Robots @
IEEE-RAS International Conference on Humanoid Robots, Pittsburgh,
US., 2007. |
|
|
2006
|
|
|
S. Behnke,
M. Schreiber, M. Bennewitz, J. Stückler,
H. Strasdat, and J. Schwenk.
Designing a Team of
Soccer-playing Humanoid Robots.
In Proceedings. of International Symposium on Robotics (ISR) and
German Conference on Robotics (ROBOTIK), Munich, Germany, May
2006. |
|
|
|
S. Behnke,
J. Stückler,
H. Strasdat, and M. Schreiber.
Hierarchical Reactive
Control for Soccer Playing Humanoid Robots.
In M Hackel, editor, Humanoid Robots, Human-like Machines,
pp.
625-642.
I-Tech,
2006.
|
|
|
|
S. Behnke,
M. Schreiber, J. Stückler, R. Renner, and
H. Strasdat.
See, Walk, and Kick:
Humanoid Robots Start to Play Soccer.
In Proceedings of the IEEE-RAS International Conference on
Humanoid Robots, pages 497-503, Genova, Italy, 2006. |
|
|
2005
|
|
|
M. Riedmiller,
T. Gabel, J. Knabe, and H. Strasdat.
Brainstormers 2d - Team
Description 2005.
In Proceedings of RoboCup International Symposium 2005,
Osaka, Japan, 2005. |
|
|


